Link za više informacija:
Cosic M., Folic R., Folic B.: Fragility and Reliability Analyses of Soil – Pile – Bridge Pier Interaction, Facta Universitatis, Series: Architecture and Civil Engineering, Vol. 16, No. 1, 2018, pp. 93-111.
Veliki broj naučnih istraživanja, kod modeliranja ponašanja i analize odgovora sistema šipovi-tlo, razmatran je u vremenskom domenu nelinearnom dinamičkom analizom (NDA – Nonlinear Dynamic Analysis) ili u kapacitativnom domenu nelinearnom statičkom pushover analizom (NSPA – Nonlinear Static Pushover Analysis). Manji broj istraživanja interakcije šipovi-tlo se bazira na inkrementalnoj nelinearnoj dinamičkoj analizi (INDA – Incremental Nonlinear Dynamic Analysis), tako da je bazna koncepcija ove studije postavljena na aspektima modeliranja ove interakcije INDA analizom.
Numeričko modeliranje interakcije šip-tlo
U postupku kreiranja matematičkog i odgovarajućeg numeričkog modela interakcije šip-tlo prolazi se kroz nekoliko faza: konkretizacija, apstrakcija i diskretizacija. Fazom konkretizacije se definiše određen problem razmatrajući posebno domene: tla, šipova i konstrukcije nad površinom tla. Fazom apstrakcije se realan fizički model šipovi-tlo zamenjuje prvo određenim matematičkim modelom, a zatim i numeričkim modelom, dok se fazom diskretizacije prethodno definisani domeni pretvaraju u manje poddomene. Modeliranje i analiza interakcije šipovi-tlo po metodi konačnih elemenata, uzimajući u obzir razvoj geometrijske i materijalne nelinearnosti, moguće je realizovati naviše načina:
- 1D konačni elementi za šipove, a tlo implicitno elementima interakcije,
- 1D konačni elementi za šipove i 2D konačni elementi za tlo,
- 1D konačni elementi za šipove i 3D konačni elementi za tlo,
- 2D konačni elementi za šipove, a tlo implicitno elementima interakcije,
- 2D konačni elementi za šipove i 2D konačni elementi za tlo,
- 3D konačni elementi za šipove, a tlo implicitno elementima interakcije,
- 3D konačni elementi za šipove i 3D konačni elementi za tlo.
Sistem interakcije šip-tlo se iz kontinualnog prevodi u diskretan numerički model, pri čemu princip diskretizacije omogućava modeliranje ponašanja poddomena na veoma visokom nivou. Princip aproksimacije koji je iskorišćen u ovom istraživanju bazira se na modeliranju šipa i konstrukcije nad površinom tla linijskim konačnim elementima, dok se modeliranje tla uvodi implicitno preko zamenjujućih elemenata. Na slici 1a je prikazan realan model šipa u tlu sa konstrukcijom nad površinom tla (stub mosta), dok je na slici 1b prikazan numerički model šipa formiran iz linijskih konačnih elemenata i konstrukcijom nad površinom tla, takođe formiranom od linijskih konačnih elemenata.
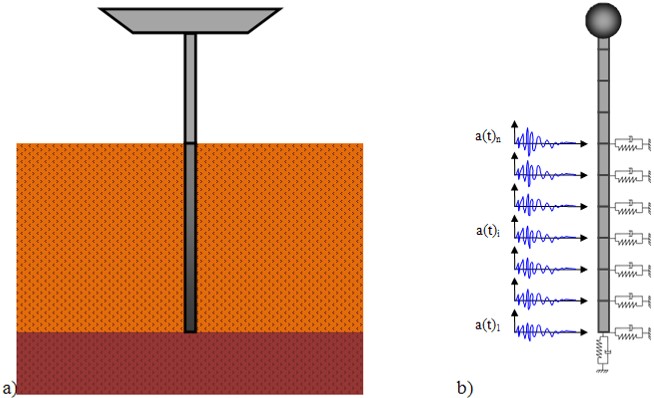
Slika 1. a) realan model šipa u tlu, stuba mosta i tla, b) numerički model šipa, stuba mosta i implicitno modeliranje uticaja tla
Liniski konačni elementi kojim se modeliraju šip i stub mosta zasnovani su na principu propagacije nelinearnih deformacija duž elementa, gde se na nivou poprečnog preseka sprovodi posebna diskretizacija na vlakna (fibre). Generalno razmatrajući poprečni presek se razmatra preko tri poddomena: vlakna neutegnutog betona (unconfined concrete fibres), vlakna utegnutog betonskog jezgra (confined concrete fibres) i vlakna armature (steel fibres). Stanje napon-deformacija na nivou poprečnog preseka određuje se integracijom nelinearnog jednoaksijalnog stanja napon-deformacija svakog pojedinačnog vlakna. Konstitutivni model ponašanja za neutegnut i utegnut domen betona je nelinearan histerezisni model betona (nonlinear constant confinement concrete model) prema Mander-u, kod koga je potrebno poznavati četiri parametra za definisanje mehaničkih karakteristika (slika 2). Prvi parametar je fck čvrstoća betona pri pritisku na cilindričnom uzorku dimenzija 150x300mm pri starosti od 28 dana prema EC 2. Drugi parametar je fctk čvrstoća betona pri aksijalnom zatezanju. Treći parametar εc,max je dilatacija betona pri maksimalnom naponu pritiska, a četvrti parametar je kc faktor odnosa utegnutog i neutegnutog napona pritiska u betonu.

Slika 2. Kriva |fc|-|εc| za definisanje parametara konstitutivnog modela ponašanja betona
Konstitutivni model ponašanja čelične armature je bilinearni elastoplastični model sa kinematičkim ojačanjem u zoni nelinearnih deformacija (bi-linear model with kinematic strain hardening) (slika 3). Definisanje mehaničkih karakteristika konstitutivnog modela ponašanja čelične armature zahteva poznavanje tri parametra. Prvi parametar je Es modul elastičnosti čelične armature, drugi parametar je σs,y napon na granici tečenja u čeličnoj armaturi, a treći parametar je μs faktor odnosa postelastične krutosti Es,p i inicijalne elastične krutosti Es (strain hardening parameter).
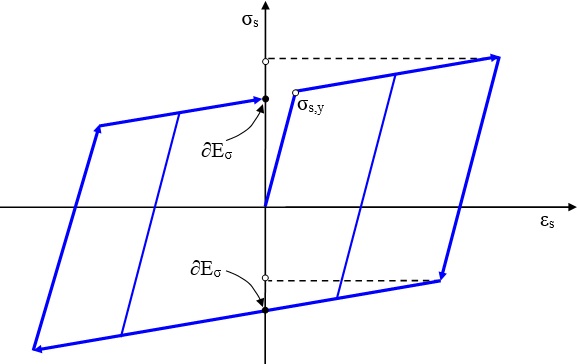
Slika 3. Kriva σs-εs za definisanje parametara konstitutivnog modela ponašanja čelične armature
Tip konačnog elementa kojim se modelira šip i stub je neelastični gredni element (inelastic displacement-based frame element). Ovakav konačni element ima šest stepeni slobode θA,y, θA,z, θB,y, θB,z, Δa, θT, dok su odgovarajuće unutrašnje sile i momenti MA,y, MA,z, MB,y, MB,z, N, MT. Geometrijska nelinearnost se uvodi primenom efekata velikih pomeranja i rotacija (large displacement and rotation) i preko P-Δ efekata. Uslovi ravnoteže i kompatibilnosti se uspostavljaju na deformisanoj konfiguraciji primenom korotacione formulacije (co-rotational formulation). Modeliranje nelinearne dinamičke interakcije šip-tlo (SPI – Soil-Pile Interaction) sprovodi se primenom konstitutivnog modela ponašanja za lateralnu analizu kod šipova, gde se uzima u obzir i formiranje otvora (gap) pri cikličnoj deformaciji tla. Takođe, uzimaju se u obzir efekti ciklične degradacije/ojačanja krutosti i čvrstoće tla, ali se pored toga posebno modeliraju uticaju u pravcu ose šipa koji su ortogonalni na efekte koji se uvode primenom ovog modela interakcije. Histerezisni konstitutivni model se sastoji iz četiri glavna dela: krive obvojnice (backbone curve), standardne krive ponovnog opterećenja (SRC – standarad reload curve), generalne krive rasterećenja (GUC – general unload curve) i direktne krive ponovnog opterećenja (DRC – direct reload curve). Definisanje mehaničkih karakteristika konstitutivnog modela ponašanja interakcije šip-tlo zahteva poznavanje devetnaest parametra: Ko inicijalna krutost (initial stiffness), Fc čvrstoća tla u drugom segmentu sa krutošću αK0 pre granice tečenja 0≤Fc<1 (soil strength ratio at first turning point), Fy čvrstoća tla na granici tečenja (yielding soil strength), P0 inicijalni koeficijent sile pri nultom pomeranju 0≤P0≤0.9 (initial force ratio at zero displacement), Pa minimalni koeficijent sile pri negativnom pomeranju 0≤Pa≤P0, Pa≤βnFy i Pa≤Fc (minimum force ratio at baseline), α koeficijent redukcije krutosti u prvom segmentu 0.001≤α≤1 (stiffness ratio after first turning point), αn faktor krutosti reversnog ciklusa opterećenja (unloading stiffness factor), β koeficijent redukcije krutosti iza granice tečenja (yielding stiffness ratio), βn koeficijent granične čvrstoće tla βn<1 za β<0, βn=1 za β=0, βn>0 za β>0 (ultimate soil strength ratio), Flg faktor podešavanja 1 od 31 kombinacije pri definisanju konstitutivnog modela (flag settings combination indicator), ep1 koeficijent početne krutosti DRC krive (DRC starting stiffness ratio), p1 parametar sile kontakta 0≤p1≤1 (gap force parameter), p2 parametar kojim se opisuje postojanje inicijalnog zazora između šipa i tla (soil cave-in parameter), pk i ek parametri degradacije/ojačanja krutosti (stiffness degradation/hardening parameters), ps i es parametri degradacije/ojačanja nosivosti (strength degradation/hardening parameters), ks nagib S-N krive (slope of the S-N curve) i f0 napon u tlu koji odgovara tački S1 na S-N krivi (soil stress corresponding to point S1 in S-N curve). Radijacijsko prigušenje je modelirano primenom formulacije nelinearnog prigušenja proporcionalno trenutnoj krutosti sa malom inicijalnom vrednosti dilatacije.
Generisanje veštačkih akcelerograma
Generisanje je procedura kreiranja veštačkih akcelerograma (artificial accelerogram) na osnovu definisanih procedura u frekventnom domenu. Ovakva procedura kreiranja akcelerograma veoma je povoljna, s obzirom da se za projektni spektar odgovora određen prema determinističkom ili probabilističkom konceptu može kreirati reprezentativni akcelerogram (GMR – ground motion record). Takođe, ovako kreiran akcelerogram je skaliran i kompatibilan prema datom projektnom spektru odgovora. Procedura generisanja veštačkih akcelerograma sprovodi se tako što se prvo odredi funkcija spektralne gustine na osnovu spektra odgovora, a u konkretnom slučaju se koristi pseudo spektar dogovora (pseudo response spectra). Ova funkcija se koristi za derivaciju amplituda sinusnog signala koji ima fazni ugao generisan funkcijom slučajnog broja u intervalu 0÷2π prema ravnomernoj raspodeli. Sinusni signali se sažimaju u cilju generisanja akcelerograma. Da bi se odredile ostale karakteristike veštačkog akcelerograma, kao što je vreme trajanja zapisa, potrebno je izdvojiti dodatne informacije o očekivanom zemljotresu na osnovu spektra odgovora. Akcelerogram generisan prema prethodno opisanoj proceduri još uvek amplitudno ne prezentuje model realnog akcelerograma. U tom cilju je potrebno preliminarno generisanom akcelerogramu definisati anvelopu akceleracija.
Nakon generisanja veštačkih akcelerograma kojim se reprezentuje zapis kretanja površine tla (free field motion), dodatno se sprovode analize u cilju generisanja akcelerograma po slojevima tla i za osvnovnu stenu (bedrock motion). U konkretnom slučaju tlo se razmatra kao jednoslojni sistem, ali pošto se koristi veći broj ulaznih akcelerograma za numeričke analize kojima se simultano vrši numerička integracija u vremenu, to se jednoslojni sistem razmatra kao višeslojni sistem sa istim geomehaničkim karakteristikama. Za svaki pojedinačan sloj se generišu akcelerogrami uzimajući u obzir propagaciju talasa kao kod jednoslojnog sistema. Generisanje akcelerograma za osnovnu stenu dobija se primenom transfer funkcije F(ω) (transfer function), a koja predstavlja odnos amplituda za površinu terena i osnovne stene.
Inkrementalna nelinearna dinamička analiza
Razmatranje odgovora interakcija šip-tlo sprovodi se u domenu analize kapaciteta (kapacitativnom domenu) primenom serije nelinearnih dinamičkih analiza (NDA – Nonlinear Dynamic Analysis), odnosno inkrementalnom nelinearnom dinamičkom analizom (INDA – Incremental Nonlinear Dynamic Analysis). Akcelerogrami se sukcesivno skaliraju od početnog minimalnog faktora skaliranja Fs,0 do krajnjeg faktora skaliranja Fs,n za kolapsno stanje. Prvo se izvršava skaliranje na određenu početnu vrednost, tako da je odgovor konstrukcije za dati skalirani nivo zemljotresa u linearno-elastičnom domenu. Skaliranje se nastavlja tako što se sukcesivno povećava PGAs,i, a kada se uoči da je razlika u odgovoru konstrukcije za dve uzastopne vrednosti skaliranja bez velike promene, tada se povećava faktor skaliranja. U slučaju da je razlika u odgovoru konstrukcije za dve uzastopne vrednosti skaliranja značajna, tada se redukuje faktor skaliranja. Na slici 4 je prikazana konstruisana INDA pushover kriva IM=f(EDP) interpolacijom diskretnih vrednosti Ii(EDPi,IMi) iz NDA analiza za skalirane akcelerograme od elastičnog, preko nelinearnog, pa sve do kolapsnog domena. Na abscisi su predstavljene vrednosti parametra inženjerskog zahteva (EDP – engineering demand parameter), a na ordinati vrednosti mere intenziteta (IM – intensity measure).
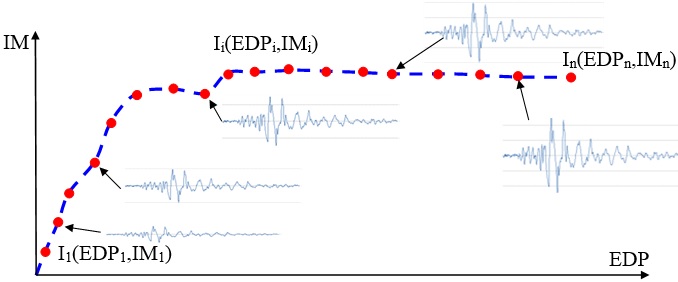
Slika 4. INDA pushover kriva IM=f(EDP) sa diskretnim vrednostima iz NDA analiza i skaliranim akcelerogramima
Termin INDA analiza primenjen u ovom istraživanju je ekvivalentan terminu postojeće IDA (Incremental Dynamic Analysis) analize INDA≡IDA, ukoliko je IDA analiza potpuna nelinearna analiza sa razvojem i geometrijske i materijalne nelinearnosti u sistemu. U postupku određivanja ubrzanja, brzine i pomeranja interakcije šip-tlo, za uslove dejstva zemljotresa, posmatraju se diferencijalne jednačine kretanja. Rešavanje jednačina (26) se sprovodi numeričkom integracijom korak po korak (step by step) Hilber-Hughes-Taylor-ovim (HHT) postupkom. Korekcija matrice krutosti sistema sprovodi se posle svakog apliciranog koraka vremena, a prema inkrementalno-iterativnoj Newton-Raphson-ovoj metodi.
Numeričke simulacije
Numeričke simulacije nelinearnog ponašanja šipa u interakciji sa tlom su sprovedene po metodi konačnih elemenata. U fazi predprocesiranja su definisani parametri numeričkog modela posebno za svaki domen prema prethodno prikazanoj matematičkoj formulaciji. Prečnik šipa i stuba mosta je dp=1.8m, a dužina šipa Lp=15m i visina stuba mosta Lb=10m. Stub i šip su kružnog poprečnog preseka sa radijalno postavljenom armaturom od 25 šipki prečnika Ø40mm. Poprečni presek je diskretizovan na 300 vlakana, a ukupno je razmatrano 10 integracionih sektora. Masa aplicirana na vrhu stuba iznosi m=816t. Konstitutivni model betona je definisan za klasu čvrstoće C25/30 prema EC 2: fck=25MPa, fctk=0, εc,max=2.10/00 i γc=24KN/m³ za neutegnut i utegnut domen betona, kc=1 za neutegnut domen betona, a kc=1.2 za utegnut domen betona. Realna vrednost čvrstoće betona pri pritisku fck,calc=30MPa za utegnuti domen betona je veća od nominalne vrednosti fck=25MPa, pošto je ista multiplikovana sa kc. Za potrebe istraživanje u ovom radu efekti napona zatezanja u betonu su anulirani fctk=0, dok je za faktor odnosa utegnutog i neutegnutog napona pritiska u betonu iskorišćen globalni koeficijent kc. Konstitutivni model čelične armature je definisan takođe prema EC 2: Es=200GPa, fs,y=435MPa, μs=0.01 i γs=78.5KN/m³. Parametri konstitutivnog modela interakcije tlo-šip su: Ko=15000KN/m³, P0=0, Pa=0, α=0.5, αn=1, β=0, βn=1, Flg=31, ep1=1, p1=1, p2=0, pk=1, ek=1, ps=1, es=1 i ks=0.1. Parametri Fc i Fy su određeni u funkciji promene po dubini tla, tako da su za 16 elemenata veze kojima su modelirane interakcije šip-tlo posebno određivane ove vrednosti prema p-y krivama. Tako je na dubini tla od h=1m Fc=0.338 i Fy=118.2KNm, a na dubini tla od h=5m Fc=0.645 i Fy=1298.2KNm. Generisanje veštačkih akcelerograma sprovedeno je za horizontalni elastični spektar odgovora (elastic response spectra) prema EC 8 za tip tla C (peskovito tlo), gde je brzina smičućih talasa vs,30=290m/s, maksimalno ubrzanje tla PGA=0.35g (PGA – peak ground acceleration), koeficijent tla S=1.2, koeficijent prigušenje ξ=5% i broj ciklusa kojima se poboljšava fitovanje spektara odgovora generisanih akcelerograma nf=100. Broj nf ima veliki uticaj na generisanje veštačkih akcelerograma, pošto se povećanjem ovog broja znatno utiče na frekventan sadržaj akcelerograma. Sa druge strane, povećanjem ovog broja dobija se nešto veći broj lokalnih ekstremuma (pikova) akceleracija, a čije vrednosti teže apsolutnoj vrednosti maksimalne akceleracije. Razmatrane su dve grupe sa po pet veštačkih akcelerograma. U prvoj grupi su akcelerogrami manjeg ukupnog vremena zapisa akceleracija tacc=20s i kraćeg vremena stacionarnog domena, gde je vreme iniciranja i vreme finalizacije stacionarnog domena ts,i=2s i ts,f=10s, respektivno (slika 5a). U drugoj grupi su akcelerogrami dužeg ukupnog vremena zapisa akceleracija tacc=40s i dužeg vremena stacionarnog domena, gde je vreme iniciranja i vreme finalizacije stacionarnog domena ts,i=2s i ts,f=15s, respektivno (slika 5b). Akcelerogrami su semplovani na interval vremena Δt=0.01s, tako da je frekvencija semplovanja (sampling frequency) fs=100Hz. Za sve generisane veštačke akcelerograme dobijeno je PGA=0.437g.
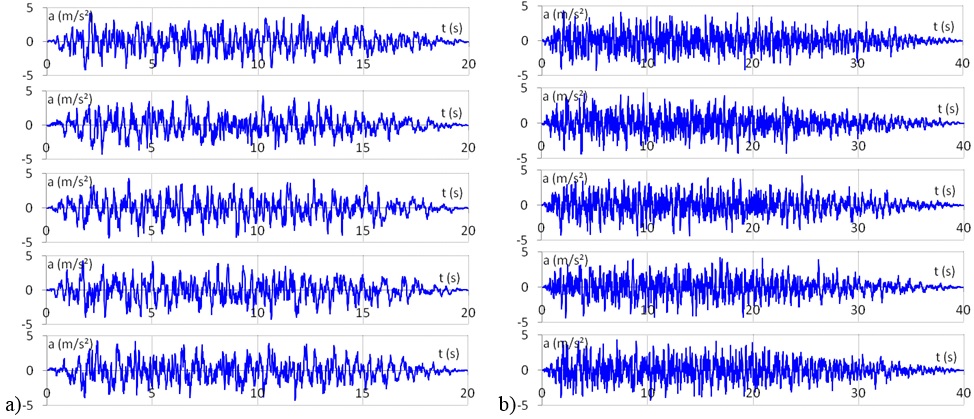
Slika 5. Generisani veštački akcelerogrami za: a) ts,i=2s, ts,f=10s, tacc=20s, b) ts,i=2s, ts,f=15s, tacc=40s
Nakon generisanja akcelerograma isti su dodatno procesirani kako bi se generisali nezavisni akcelerogrami po dubini tla a(t)i (slika 6). Domen tla je diskretizovan na 15 slojeva debljine 1m i posebno je razmatran domen za osvnovnu stenu, tako da se u fazi procesiranja koristi simultano po 16 akcelerograma za svaku INDA analizu.
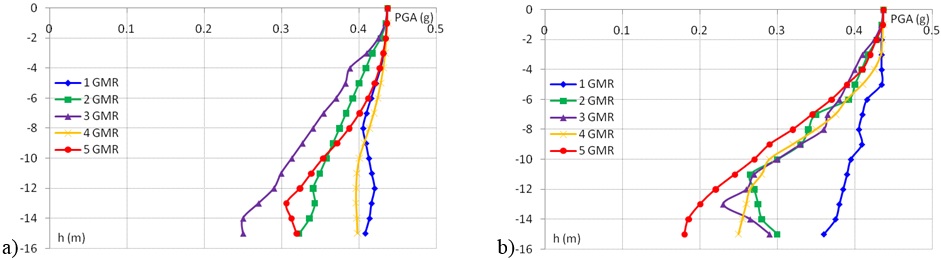
Slika 6. Promena PGA po dubini tla za generisane veštačke akcelerograme: a) prva grupa, b) druga grupa
Ukupan broj ovako generisanih akcelerograma je 160. Za ovako generisane akcelerograme vrši se simultano skaliranje kod INDA analiza, tako da se za jednu INDA analizu sprovodi skaliranje svih 16 akcelerograma istim faktorom skaliranja. Prvo su akcelerogrami skalirani na inicijalnu vrednost PGAs,1=0.1g za h=0, a zatim inkrementalno skalirani za ΔPGA=0.1g. S obzirom na razliku u akcelerogramima i razliku u faktorima skaliranja prema slici 6 konačni faktori skaliranja po akcelerogramima za jednu INDA analizu se razlikuju. Zbog velikog broja generisanih akcelerograma isti nisu prikazani u ovom istraživanju, već samo vrednosti promene PGA po dubini tla. Za svaku INDA analizu akcelerogrami su skalirani do PGA=3g, tako da je ukupan broj NDA analiza 300. Procesiranjem INDA analiza dobijaju se diskretne vrednosti Ii(EDPi,IMi) koje se zatim interpoliraju i predstavljaju odgovor sistema u kapacitativnom domenu. Za EDP parametar selektovan je globalni drift (DR), dok je za IM parametar selektovano PGA. Na slikama 7 i 8 su prikazane krive odnosa DR-PGA za vrh stuba i za glavu šipa, respektivno. Generalno se može konstatovati da postoji odstupanje u odgovoru sistema šip-tlo za dve različite grupe akcelerograma, prva sa tacc=20s i druga sa tacc=40s ukupnim vremenom zapisa akceleracija. Takođe, razlika postoji i pri razmatranju odgovora stuba i šipa, gde da su realizovane nešto veće vrednosti PGA za šip, u odnosu na stub. Interval vrednosti drifta kod stuba razmatran je u granicama od DR=[0¸20]%, dok je kod šipa ovaj interval DR=[0¸10]%.
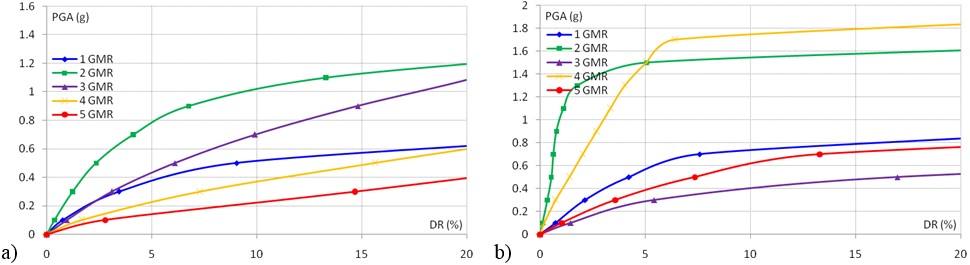
Slika 7. Krive odnosa DR-PGA za vrh stuba: a) prva grupa akcelerograma, b) druga grupa akcelerograma
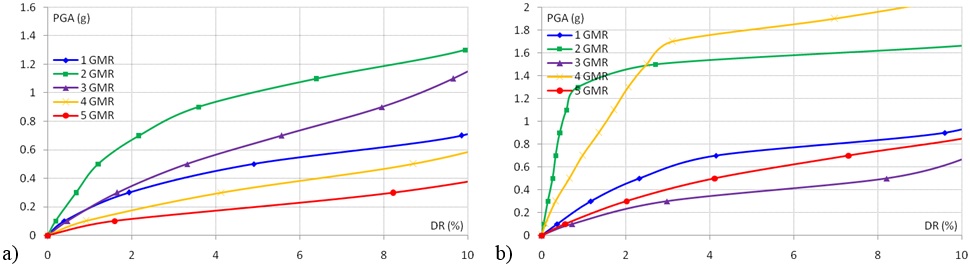
Slika 8. Krive odnosa DR-PGA za glavu šipa: a) prva grupa akcelerograma, b) druga grupa akcelerograma
Određivanje graničnih stanja sistema šip-tlo sprovodi se razmatranjem performansnih nivoa (SPL – structural performance levels): trenutna useljivost (IO – immediate occupancy), sprečavanje kolapsa (CP – collapse prevention) i globalna dinamička nestabilnost sistema (GI – global dynamic instability). Problem određivanja graničnih stanja sistema može se sprovesti preko EDP ili IM parametara, tako što se za određeni parametar EDP ili IM proračunava njemu odgovarajući parametar. Za potrebe istraživanja u ovom radu utvrđivanje odgovarajućih graničnih stanja IM parametra sprovedeno je na osnovu EDP parametra prema propisima. Performansni nivo IO je određen razmatrajući vrednost PGA za globalni drift DRIO armiranobetonskih sistema prema SEAOC i FEMA 356. Performansni nivo CP se određuje kada je nagib tangente na PGA=f(DR) krivi jednak vrednosti 20% inicijalnog elastičnog nagiba DRe ove krive ili kada je DR=10%. Određivanje performansnog nivoa GI sprovodi se za uslov da se PGA=f(DR) kriva asimptotski približava horizontalnoj liniji. Na osnovu prethodno postavljenih kriterijuma za utvrđivanje performansnih nivoa sprovedene su statističke analize za svaku PGA=f(DR) krivu. Na slikama 9 i 10 su prikazane diskretne vrednosti određenih performansnih nivoa PGAi za interakciju šip-tlo, posebno za stub i šip, respektivno. Na abscisi je prikazan broj diskretnih vrednosti, a na ordinati vrednosti PGAi određene prema prethodno opisanim postupcima.

Slika 9. Diskretne vrednosti PGA određenih performansnih nivoa za stub: a) IO, b) CP, c) GI

Slika 10. Diskretne vrednosti PGA određenih performansnih nivoa šip: a) IO, b) CP, c) GI
Određivanje mere intenziteta PGAIO kod IO performansnog kriterijuma je uvek u funkciji fiksne vrednosti DRIO, međutim mera intenziteta PGACP kod CP performansnog kriterijuma može znatni oscilirati. U konkretnom slučaju realizovana je niža vrednost drifta DRmin=0.9% za CP performansno stanje u odnosu na vrednost drifta DRmin=1% za IOmax performansno stanje kod glave šipa. Posledica ovakve situacije je da se kod šipa može očekivati znatno raniji razvoj predkolapsnog stanja kod druge grupe akcelerograma. Određivanje GI performansnog stanja je znatno komplikovanije u odnosu na prethodna IO i CP performansna stanja, pošto se, u određenim situacijama, PGA=f(DR) kriva ne mora asimptotski približavati horizontalnoj liniji. Tačnije, potreban uslov bi bio da je PGA=f(DR) kriva potpuno horizontalna, ali se ovakav uslov u velikom broju slučajeva ne mora ispuniti, osim kada se znak nagiba PGA=f(DR) krive menja iz pozitivne u negativnu vrednost. Ovakav uslov je postignut samo u jednom slučaju i to za DRmin=18.6% i PGA=0.39g kod stuba, a u ostalim slučajevima je GI performansni nivo određivan iz vrednosti maksimalnog drifta.
U odnosu na prethodno prikazani deterministički postupak ocene performansnih nivoa i stanja sistema interakcije šip-tlo, primenom teorije verovatnoće (probability) moguće je razmatrati stanja povredljivosti (fragility) sistema. Probabilistički koncept u analizi interakcije sistema šip-tlo bazira se na kvalitativnom razmatranju nivoa oštećenja prema HAZUS: blago (slight), umereno (moderate), značajno (extensive) i potpuno (complete). Ovi nivoi oštećenja su definisani u funkciji duktilnosti sistema μ, tako da nivou blagog oštećenja odgovara 1<μ<2, umerenog oštećenja 2<μ<4, značajnog oštećenja 4<μ<7 i potpunog oštećenja μ>7. Parametar intenziteta IM se uobičajeno razmatra tako što se odrede odgovarajući spektri odgovora sa varijacijom standardne devijacije ±σ, a koja je u funkciji neodređenosti (uncertainty) seizmičkog zahteva (seismic demand) koji se postavlja pred konstrukciju. Međutim, u ovom istraživanju primenjena je varijacija seizmičkog zahteva u funkciji skaliranja parametra IM, odnosno PGA prema INDA analizi. U tom smislu moguće je razmatrati znatno širi spektar varijacije seizmičkog zahteva PGA=[0¸1]g bez dodatne ekstrapolacije. Relacija μ i PGA je određena primenom regresione analize za linearnu funkciju lnμ=k·lnPGA+n (slika 11).
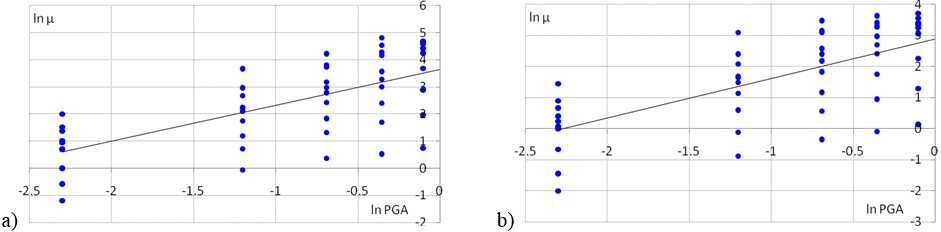
Slika 11. Regresiona analiza za relaciju DR i PGA: a) stub, b) šip
Konstrukcija kriva povredljivosti sprovedena je u odnosu na PGA meru intenziteta primenom log-normalne raspodele (log-normal distribution). Na slikama 12a i 12b su prikazane funkcije diskretne verovatnoće za stub i šip, respektivno. Manji nivo oštećenja je karakterističan do PGA=0.2g za model stuba, dok je kod šipa ova vrednost do PGA=0.3g.
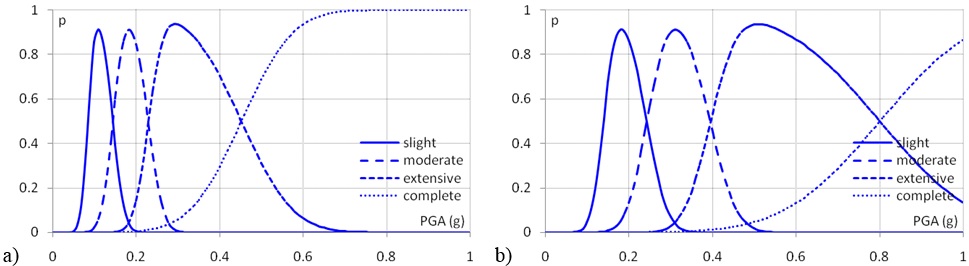
Slika 12. Funkcije diskretne verovatnoće: a) stub, b) šip
Kumulativna funkcija verovatnoće raspodele oštećenja za seizmičku interakciju šip-tlo prikazana je na slikama 13a i 13b za stub i šip, respektivno. Gornja granica nivoa potpunog oštećenja razmatrana ja za μsup=20, pri čemu promena ove granice značajno utiče na kumulativnu funkciju verovatnoće raspodele potpunog oštećenja. Komparacijom dobijenih rešenja za stub i šip može se konstatovati da je stub osetljiviji na promenu nivoa mere intenziteta PGA. Posledica ovog tvrđenja je da se pri istom nivou PGA javljaju veća oštećenja u stubu i da je veća verovatnoća pojave oštećenja većeg intenziteta.
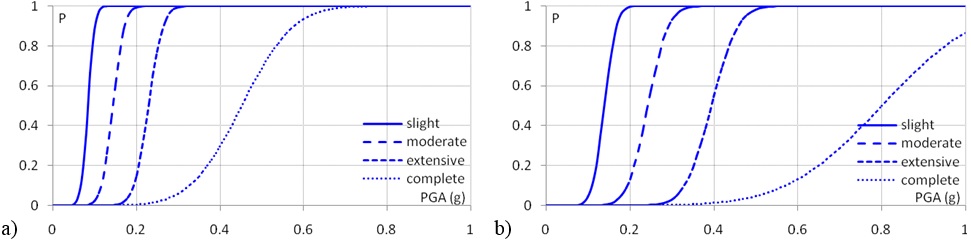
Slika 13. Krive povredljivosti (fragility curves) za seizmičku interakciju šip-tlo: a) stub, b) šip
Ukoliko se, na primer, uzme u obzir da je vrednost PGA=0.1g, tada se može konstatovati da će se veći stepen povredljivosti realizovati u slučaju stuba, nego u slučaju šipa, pri svim nivoima povredljivosti. U ovom slučaju verovatnoće povredljivosti stuba i šipa za nivo blagog oštećenja su P=0.88 i P=0.04, respektivno, a za nivo značajnog oštećenja P=0 i za stub i za šip. Sa druge strane, za PGA=0.3g verovatnoće povredljivosti stuba i šipa za nivo blagog oštećenja su P=1, a za nivo značajnog oštećenja P=0.99 i P=0.03, respektivno.
Procena performansi sistema takođe je sprovedena analizom stanja pouzdanosti (reliability) sistema. Primenom ove analize se dobija potpuniji odgovor stanja sistema, a bazirano na prethodno razmatranoj analizi povredljivosti. Negativna vrednosti koeficijenta R ukazuje na moguć otkaz i nepouzdanost sistema, dok pozitivna vrednost koeficijenta R ukazuje na verovatnoću otkaza približno jednaku 0 i na značajniju pouzdanost sistema. Kada je vrednost koeficijenta R≈6, tada je pouzdanost sistema ≈100%, dok u slučaju da je koeficijent R≈0 može se govoriti o verovatnoći otkaza sistema od P=50%. Krive pouzdanosti (reliability curves) za seizmičku interakciju šip-tlo prikazane su na slikama 14a i 14b za stub i šip, respektivno. Komparacijom dobijenih rešenja za stub i šip može se konstatovati da je stub osetljiviji na promenu nivoa mere intenziteta PGA, tako da se kod njega mogu očekivati veći nivoi nepouzdanosti pri nižim vrednostima PGA, u odnosu na šip.
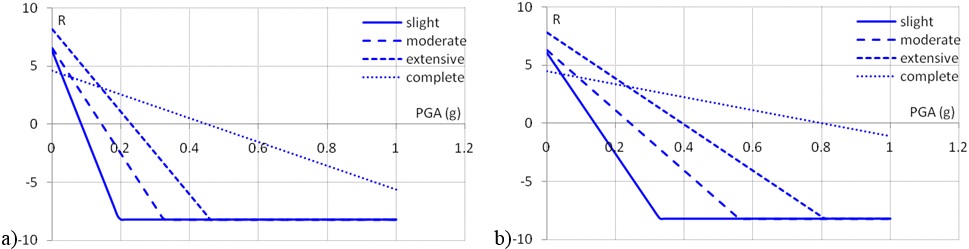
Slika 14. Krive pouzdanosti (reliability curves) za seizmičku interakciju šip-tlo: a) stub, b) šip
Pouzdanost stuba za P>50% kod nivoa blagog oštećenja je pri PGA≤0.08g, nivoa umerenog oštećenja pri PGA≤0.14g, nivoa značajnog oštećenja pri PGA≤0.22g i kod nivoa potpunog oštećenja pri PGA≤0.45g. Pouzdanost šipa za P>50% kod nivoa blagog oštećenja je pri PGA≤0.13g, nivoa umerenog oštećenja pri PGA≤0.24g, nivoa značajnog oštećenja pri PGA≤0.39g i kod nivoa potpunog oštećenja pri PGA≤0.8g.
Link za više informacija:
Cosic M., Folic R., Folic B.: Fragility and Reliability Analyses of Soil – Pile – Bridge Pier Interaction, Facta Universitatis, Series: Architecture and Civil Engineering, Vol. 16, No. 1, 2018, pp. 93-111.