Link za više informacija:
Cosic M., Brcic S.: The Development of Controlled Damage Mechanisms-Based Design Method for Nonlinear Static Pushover Analysis, Facta Universitatis, Series: Architecture and Civil Engineering, Vol. 12, No. 1, 2014, pp. 25-40.
Istraživanje prezentovano u ovom tekstu zasniva se na principu kontrolisanja mehanizma oštećenja i loma sistema, bez uvođenja dodatnih elemenata u konstruktivni sistem, a sprovodi se u četiri ključna koraka:
- identifikacija optimalnog mehanizma oštećenja i loma zgrade prema metodi programiranog ponašanja (CDM – Capacity Design Method),
- proračun nelinearnog odgovora zgrade NSPA analizom u kapacitativnom domenu (capacity domain),
- kontrola komparacijom optimalnog i realizovanog mehanizma oštećenja i loma zgrade (DMBD – Damage Mechanisms-Based Design),
- redimenzionisanje sistema.
Povezivanjem CDM metode, NSPA analize i koncepta projektovanja konstrukcija prema mehanizmima loma razvijena je nova metoda. Pošto je kod koncepta projektovanja konstrukcija prema mehanizmima loma inkorporirana CDM metoda, to je naslov nove metode formulisan kao “nelinearna statička seizmička analiza zasnovana na principu projektovanja zgrada prema mehanizmima loma” (NSPA-DMBD – Nonlinear Static Pushover Analysis – Damage Mechanisms-Based Design). Primenom NSPA-DMBD metode omogućava se potpuno upravljanje nelinearnog odgovora sistema preko mehanizma oštećenja i loma.
Koncept metode programiranog ponašanja u nelinearnoj analizi zgrada
CDM je metoda projektovanja u kome se biraju elementi konstrukcijskog sistema koji se na odgovarajući način projektuju i oblikuju za disipaciju energije pri velikim deformacijama, dok su ostali konstrukcijski elementi obezbeđeni sa dovoljnom nosivošću, tako da može da se ostvari izabrani način disipacije energije. U slučaju dejstva zemljotresa, a u zavisnosti od njegove jačine, pojedini delovi konstrukcije prelaze u nelinearno područje rada materijala. Sa druge strane, višespratne okvirne zgrade su višestruko statički neodređeni i kinematički stabilni sistemi, a što im omogućava određene povoljnosti u odnosu na statički određene sisteme. Primenom NSPA analize moguće je odabrati mesta potencijalnih plastifikacija sistema, čime se stvaraju uslovi da se na sistemu formira poželjni (optimalan) mehanizam loma. Na taj način se kotrolisanim razvojem nelinearnih deformacija na sistemu sprečava da isti dođe u stanje potpunog kolapsa. Glavna ideja ove metode je da se unapred izaberu elementi, odnosno načini neelastičnog deformisanja koji mogu formirati mehanizme sa velikom sposobnošću absorpcije energije i ne ugrožavaju vertikalnu nosivost konstrukcije. Ti elementi se namerno dimenzionišu tako da se prvi plastificiraju, a istovremeno su detalji njihovog izvođenja takvi da omogućavaju što veću disipaciju energije. Ostalim elementima obezbeđuje se dovoljno velika nosivost tako da se mogu programirani mehanizmi absorpcije u potpunosti prihvatiti. Kod višespratnih okvirnih zgrada zone spojeva greda-stub, odnosno krajevi greda i stubova su mesta gde se razvijaju plastične deformacije i na ova mesta treba računati u analizi mehanizama loma. Za gredne elemente je dominantna plastifikacija usled momenata savijanja, dok se kod stubova odvija plastifikacija pri interakciji momenta savijanja i normalne sile. Primenjujući koncept CDM metode za analizu višespratnih okvirnih zgrada, idealan plastični mehanizam bi bio da se razviju nelinearne plastične deformacije na krajevima greda i samo na krajevima stubova na mestima uklještenja. Na taj način se disipacija seizmičke energije vrši preko grednog mehanizma, jer je u slučaju spratnog mehanizma mnogo teže obezbediti zahtevani kapacitet rotacije.
Preliminarno istraživanje na 2D okvirnim modelima sprovedeno je u cilju prezentacije i razmatranja problema CDM metode NSPA analizom. Kao reprezentativni usvojen je 10-spratni 4-brodni armiranobetonski okvirni model sa različitim mogućnostima razvoja mehanizma loma:
- I – plastični zglobovi postavljeni na krajevima svih štapova (180 plastičnih zglobova) za simulaciju opšteg mehanizma loma,
- II – plastični zglobovi postavljeni na krajevima greda i na krajevima stubova na mestima uklještenja (85 plastičnih zglobova) za simulaciju optimalnog mehanizma loma,
- III – plastični zglobovi postavljeni na krajevima greda (80 plastičnih zglobova) za simulaciju “jakih” stubova i “slabih” greda (strong column-weak beam failure),
- IV – plastični zglobovi postavljeni na krajevima stubova (100 plastičnih zglobova) za simulaciju “jakih” greda i “slabih” stubova (strong beam-weak column failure).
Za prethodno definisane numeričke modele izvršene su NSPA analize kontrolom inkrementalnog priraštaja opterećenja. Zatim su na osnovu datih analiza određena maksimalna pomeranja, koja su poslužila za definisanje maksimalnog pomeranja za analizu kontrole inkrementalnog priraštaja pomeranja. Nakon svih ovih sprovedenih analiza razvijene su NSPA pushover krive (slika 1). Generalno, najlošija situacija se dobija za model IV pošto je kod istog dozvoljeno samo formiranje plastičnih zglobova na stubovima i gde je realizovan najniži nivo duktilnosti, dok je nosivost gotovo identična kao i za model I. Analizirajući nosivost, krutost i duktilnost dosta bolje rešenje je dobijeno za modele II i III, u odnosu na model I i IV. Kod modela II sa plastičnim zglobovima postavljenim po CDM metodi realizuje se veća nosivost u nelinearnom domenu, krutost je pozitivna i duktilnost je znatno uvećana, gotovo dvostruko, komparirajući sa modelom I. Ukoliko se dozvoli samo formiranje plastičnih zglobova na gredama, kao što je to kod modela III, tada je moguće postići i najveću nosivost u nelinearnom domenu. Sa druge strane, razvoj mehanizma loma kod ovakvog modela ne bi bio dovoljno iscrpljen, pošto je moguće dozvoliti i dodatno formiranje plastičnih zglobova na krajevima stubova na mestima uklještenja, a da se ne ugrozi globalna stabilnost sistema. Takođe, moguće je učiniti korak dalje, a to je da se od pretpostavljenog rasporeda plastičnih zglobova na sistemu pri unapred izabranim driftovima dozvoli sub-mehanizam plastifikacije, a da se pri daljem nanošenju lateralnog opterećenja sistem dovodi u pretpostavljeni mehanizam plastifikacije. Na ovaj način se može dozvoliti formiranje plastičnih zglobova na dominantnom broju greda, pa tek onda na krajevima stubova na mestima uklještenja.

Slika 1. Razvijene NSPA pushover krive za razmatrane modele
U narednom koraku su primenom metode spektra kapaciteta (CSM – Capacity Spectrum Method) prema ATC 40 određeni nivoi ciljnih pomeranja. Prethodno su pushover krive konvertovane u format spektralno pomeranje-spektralno ubrzanje (ADRS – acceleration displacement response spectrum), gde su takođe prikazane krive zahteva (demand curve), spektri odgovora i radijalne linije za različite nivoe perioda vibracija. Na slici 2 prikazana su rešenja dobijena CSM metodom u ADRS formatu za sve razmatrane modele mehanizma loma. Upoređujući nivoe ciljnih pomeranja može se konstatovati gotovo identičnost, ali je razlika u ukupnim smičućim silama u osnovi objekta (V/W) značajna. Modeli mehanizama I i IV imaju znatno manje vrednosti ukupnih smičućih sila u osnovi objekta, dok su za modele mehanizama II i III ove vrednosti znatno veće, a što ukazuje da su modeli znatno krući pa navlače na sebe veće seizmičke sile. Veće seizmičke sile znače i potrebne veće poprečne preseke, odnosno korekciju potrebne armature. Povećanje ukupne smičuće sile u osnovi objekta za model mehanizma II, u odnosu na model mehanizma I, iznosi do 15%.

Slika 2. Pushover krive, krive zahteva, spektri odgovora i radijalne linije za različite nivoe perioda vibracija u ADRS formatu za modele: a) I, b) II, c) III, d) IV
Na slici 3 prikazani su formirani plastični zglobovi za sve razmatrane modele mehanizma loma pri nivou drifta DR=0.4%. Kod modela mehanizama loma II i III karakteristično je formiranje plastičnih zglobova u srednjim i nižim spratovima, dok je kod I i IV modela karakteristično formiranje plastičnih zglobova u srednjim spratovima. Takođe, kod I i IV modela identifikovani su spratni mehanizmi loma, pošto su formirani raspoloživi plastični zglobovi u stubovima.
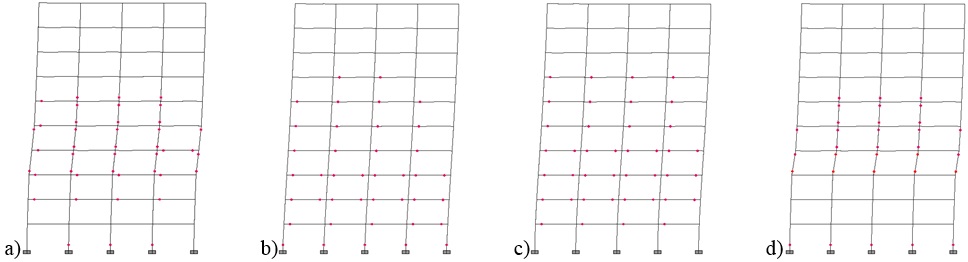
Slika 3. Formirani plastični zglobovi pri nivou drifta DR=0.4% za model: a) I, b) II, c) III, d) IV
Analogno razvoju plastičnih zglobova kod I i IV modela i međuspratni driftovi su dosta izraženi u srednjim spratovima, a što ukazuje na razvoj znatnih nelinearnih deformacija koje su stvorene kombinovanim, odnosno spratnim mehanizmima loma (slika 4a). Skok u vrednosti globalnih driftova, od trećeg do petog sprata, takođe ukazuje na nepoželjne mehanizame loma koji se javljaju kod I i IV modela (slika 4b).

Slika 4. Dijagrami: a) međuspratnih driftova IDR, b) globalnih driftova DR za razmatrane modele
Nakon svake inkrementalne situacije, pri različitim nivoima drifta, moguće je analizirati broj formiranih plastičnih zglobova Nph za međuperformansna stanja B-IO, IO-LS, LS-CP, CP-C, C-D, D-E i >E, a prema FEMA 356. Dominantno stanje nelinearnih deformacija u plastičnim zglobovima je B-IO, a zatim sledi IO-LS i LS-CP, s’tim što se kod modela mehanizma loma I i IV formiraju i plastični zglobovi za performansna stanja D-E i >E do maksimalne vrednosti globalnog drifta od DR=1%, za koji je vršen monitoring (slika 5). Formiranje plastičnih zglobova kod I i IV modela mehanizma loma, za performansna stanja D-E i >E, ukazuje na redukciju nosivosti već pri znatno nižim vrednostima maksimalno realizovanog globalnog drifta konstrukcije. Primenom CDM metode sa kontrolisanim mehanizmom loma, kod modela II, izbegava se prerani lom na pojedinim delovima greda i stubova, a time i prerani kolaps konstrukcije. Istraživanje prikazano u ovom primeru daje preliminarnu ocenu prednosti CDM metode u NSPA analizi okvirnih zgrada i to za slučaj modeliranja razvoja materijalne nelinearnosti preko plastičnih zglobova.

Slika 5. Broj i raspodela formiranih plastičnih zglobova pri različitim nivoima drifta 10-spratnog okvira, a u funkciji performansnih stanja za model: a) I, b) II, c) III, d) IV
Performanse okvirnih zgrada prema NSPA-DMBD metodi
Matematička formulacija problema NSPA-DMBD metode, originalno razvijena u ovom istraživanju, zasniva se na primeni principa virtualnog rada i kinematičke metode, gde se razmatra balans rada spoljašnjeg opterećenja Ae i rada unutrašnjih elemenata za disipaciju energije Ai (slika 6). Pošto se postupak analize mehanizma loma sistema po NSPA-DMBD metodi sprovodi iterativno, a dimenzionisanje proverava nakon dostignute granične dilatacije, to je uveden termin iterativno-interaktivno dimenzionisanje (IID – Iterative-Interactive Design). Generalno razmatrajući, mehanizam loma sistema moguće je pratiti preko: globalne duktilnosti zgrade, globalnog drifta, međuspratnih driftova, lokalne duktilnosti štapova, relacije momenat-krivina za poprečne preseke i preko dilatacija. U odnosu na makro aspekt razmatranja mehanizma loma sistema preko globalne duktilnosti ili globalnih driftova, NSPA-DMBD metoda je razvijena na principu da se razvoj mehanizma loma sistema prati na nivou mikro aspekta, odnosno preko dilatacija.

Slika 6. Model višespratne MRF okvirne zgrade sa plastifikacijom štapova prema NSPA-DMBD metodi
Dijagram toka razvijene NSPA-DMBD metode prikazan je na slici 7. U fazi predprocesiranja se definiše poželjan (optimalan) mehanizam loma sistema i kriterijumi za indiciranje dostignutih performansnih stanja na nivou materijala, a za granične dilatacije armature (ultimate strain of steel reinforcement) i granične dilatacije utegnutog betona (ultimate strain of confined concrete). Zatim se vrši proračun LSA analizom za vertikalno gravitaciono opterećenje, čime se simulira ponašanje objekta u realnim uslovima. Nakon sprovedene LSA analize seizmičko opterećenje se podeli na n delova i za svaki deo se vrši proračun inkrementalno. Matrica krutosti sistema iz LSA analize koristi se kao inicijalna matrica krutosti NSPA analize. Pošto se izvrši prva NSPA analiza za Si=1 seizmičke uticaje, analizira se stanje mehanizma loma sistema. Ukoliko se seizmičko opterećenje podeli na veliki broj delova, moguće je da za prvu Si=1 NSPA analizu mehanizam loma i ne bude razvijen, pošto nije iniciran razvoj nelinearnih deformacija u štapovima. U ovoj fazi se dakle, ispituje mehanizam loma sistema preko dilatacija armature i betona. Ukoliko se potvrdi da se NSPA analizom za Si razvio nepovoljan mehanizam loma, utvrđuje se nivo dilatacija za svako vlakno, odnosno presek posebno. Zatim se prelazi na korekciju armature redimenzionisanjem ukoliko su prekoračene granične dilatacije, a u suprotnom se prelazi na ispitivanje kriterijuma odnosa drifta za trenutno proračunsko stanje DRi i drifta za IO (immediate occupancy) performansni nivo DRIO. Ako se pokaže da je DRi>DRIO, tada se sprovodi analiza ciljnog pomeranja za NSPA analizu (NSPA-TD – Nonlinear Static Pushover Analysis – target displacement), dok se u suprotnom prelazi na nov inkrement seizmičkog opterećenja i+1 i prethodno opisana procedura ispitivanja kriterijuma i proračuna se ponavlja.

Slika 7. Dijagram toka NSPA-DMBD metode
Uslov DRi>DRIO je postavljen u cilju da se obezbedi razvoj mehanizma loma prema CDM metodi ulaskom u IO performansno nivo. Nakon sprovedene NSPA-TD analize, vrši se ispitivanje kriterijuma odnosa drifta za trenutno proračunsko stanje DRi i drifta za nivo ciljnog pomeranja DRt. Ispunjenjem ovog kriterijuma NSPA-DMBD metoda se završava, dok se u suprotnom prelazi na nov inkrement seizmičkog opterećenja i+1 i prethodno opisana procedura ispitivanja kriterijuma i proračuna se ponavlja. U zavisnosti od odnosa seizmički zahtev/kapacitet konstrukcije, nivo ciljnog pomeranja se može nalaziti u domenu DRt,min<DRt<DRt,max (slika 8). Ukoliko je DRt≈DRt,min, tada je potrebno sprovesti manji broj iteracija po NSPA-DMBD metodi, a ukoliko je DRt≈DRt,max, tada je potrebno sprovesti znatno veći broj iteracija po NSPA-DMBD metodi.

Slika 8. Određivanje domena nivoa ciljnog pomeranja DRt,min<DRt<DRt,max u cilju predikcije količine iteracija po NSPA-DMBD metodi
Na slici 9 je prikazana originalna NSPA pushover kriva, pushover krive za faze iteracija NSPA-DMBD metode i finalna NSPA-DMBD pushover kriva. NSPA pushover krive za faze iteracija su prikazane za slučaj da je dostignuta granična dilatacija εs,u ili εc,u.

Slika 9. Originalna NSPA pushover kriva, pushover krive za faze iteracija NSPA-DMBD metode i finalna NSPA-DMBD pushover kriva
Numeričko testiranje NSPA-DMBD metode sprovedeno je na 2D 8-spratnom 4-brodnom okvirnom sistemu. Okvirni sistem je prethodno dimenzionisan prema EC 8 propisima, a zatim je na istom sprovedena nelinearna statička pushover analiza prema pomeranju (NSPA-DBA – Nonlinear Static Pushover Analysis – Displacement-Based Design) i razvijena odgovarajuća pushover kriva. Performansni kriterijumi su postavljeni pre sprovođenja NSPA-DMBD metode za granične dilatacije:
- armature εs,u=10‰ za bilinearni konstitutivni materijalni model sa kinematičkim ojačanjem u zoni nelinearnih deformacija (BL-KSH – bi-linear model with kinematic strain hardening),
- utegnutog betona εc,u=3.5‰ za nelinearan konstitutivni materijalni model (NL-CCC – nonlinear constant confinement concrete model).
Ukupan broj sprovedenih iteracija u okviru NSPA-DMBD metode je devet, pošto se pri poslednjoj iteraciji nije realizovao nepovoljan mehanizam loma čak i pri maksimalnoj vrednosti globalnog drifta od DRmax=3.3%. Indiciranje razvoja nepovoljnog mehanizma loma uočeno je pri nivou drifta DR=1.55% prekoračenjem graničnih dilatacija u betonu prema NSPA-DBA metodi, a za stub četvrtog sprata (slika 10a). U narednom koraku je izvršena korekcija armature u stubovima trećeg i četvrtog sprata, a zatim sprovedena nova iteracija u okviru NSPA-DBA metode. Za ovako sprovedenu analizu identifikovan je nepovoljan mehanizam loma pri nivou drifta DR=2.22% prekoračenjem graničnih dilatacija u betonu drugog sprata (slika 10b). Za treću iteraciju u okviru NSPA-DMBD metode nepovoljan mehanizam loma, pri nivou drifta DR=2.22%, je ostvaren prekoračenjem graničnih dilatacija u betonu za stubove četvrtog sprata (slika 10c), dok je za petu iteraciju u okviru NSPA-DMBD metode nepovoljan mehanizam loma, pri nivou drifta DR=2.55%, ostvaren prekoračenjem graničnih dilatacija u armaturi za stubove prvog sprata (slika 10d). Kod sedme iteracije NSPA-DMBD metode nepovoljan mehanizam loma je, pri nivou drifta DR=2.77%, ostvaren prekoračenjem graničnih dilatacija u betonu za stub drugog sprata (slika 10e). Generalno se može konstatovati povećanje nivoa drifta po NSPA-DMBD metodi uz smanjenje nivoa oštećenja i rizika od kolapsa, a što je posledica korekcije mehanizma loma sistema, od nepovoljnog ka optimalnom.

Slika 10. Iteracije NSPA-DBA metode: a) inicijalna (DR=1.55%), b) prva (DR=2.22%), c) treća (DR=2.22%), d) peta (DR=2.55%), e) sedma (DR=2.77%), f) deveta (finalna)
Mesta razvoja mehanizma loma na nivou štapova su u najvećem broju slučajeva lokalizovana na spoju greda-stub, dok je samo na manjem broju analiza identifikovan razvoj graničnih dilatacija van ove zone, kao što je peta iteracija NSPA-DMBD metode. Od ukupno devet sprovedenih iteracija u okviru NSPA-DMBD metode kod četiri su identifikovana prekoračenja graničnih dilatacija u armaturi, dok su za preostale analize bile merodavna prekoračenja graničnih dilatacija u betonu. Prilikom proračuna okvirnih armiranobetonskih zgrada, a primenom standardizovanih propisa za dimenzionisanje armiranobetonskih preseka, teži se razvoju loma dostizanjem graničnih dilatacija po armaturi. Na taj način se u armiranobetonskim elementima obezbeđuje povoljno duktilno ponašanje. Primenom razvijene NSPA-DMBD metode i istraživanjem na modelu okvirne zgrade ukazano je da je čak kod inicijalne NSPA-DBA analize indikator nepovoljnog mehanizma loma bio preko graničnih dilatacija betona. Generisane NSPA pushover krive za sve analize prikazane su na slici 11. Uticaj korekcije mehanizma loma sistema primenom NSPA-DMBD metode nema većeg značaja na globalnom nivou do vrednosti drifta DR=1.5%, gde se dobijaju gotovo identična rešenja kao i za inicijalnu originalnu pushover krivu. Daljim povećanjem nivoa drifta i ulaskom u domen izraženog nelinearnog ponašanja ova razlika postaje sve značajnija, tako da razvoj i karakter optimalnog mehanizma loma dobija na značaju. Kod inicijalne NSPA-DBA pushover krive krutost u nelinearnom domenu konstantno se redukuje, dok se kod NSPA-DMBD pushover krive krutost u nelinearnom domenu povećava kako se povećava broj iteracija.

Slika 11. Originalna NSPA pushover kriva, pushover krive za iteracije NSPA-DMBD metode i finalna NSPA-DMBD pushover kriva
Na slici 12 prikazani su međuspratni driftovi prema NSPA-DMBD metodi za četiri nivoa maksimalnih driftova: DRmax=1.5%, DRmax=2%, DRmax=2.5% i DRmax=3%. Evidentno je da povećanjem broja iteracija prema NSPA-DMBD metodi maksimalna vrednost međuspratnog drifta se smanjuje, pri svim nivoima razmatranih maksimalnih driftova DRmax. Vrednosti međuspratnih driftova se redukuju kod nižih spratova, dok se kod viših spratova povećavaju uravnotežujući na taj način odgovor konstrukcije prema NSPA-DMBD metodi.
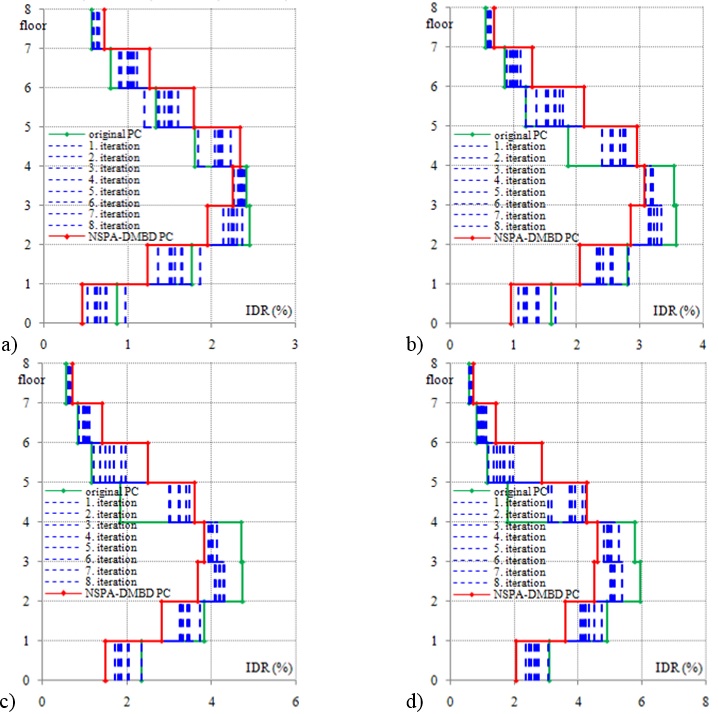
Slika 12. Dijagrami međuspratnih driftova IDR prema NSPA-DMBD metodi za: a) DRmax=1.5%, b) DRmax=2%, c) DRmax=2.5%, d) DRmax=3%
Na slici 13 prikazani su globalni driftovi prema NSPA-DMBD metodi za četiri nivoa maksimalnih driftova: DRmax=1.5%, DRmax=2%, DRmax=2.5% i DRmax=3%. Evidentna je redukcija driftova po svim spratovima za finalnu iteraciju NSPA-DMBD metode.
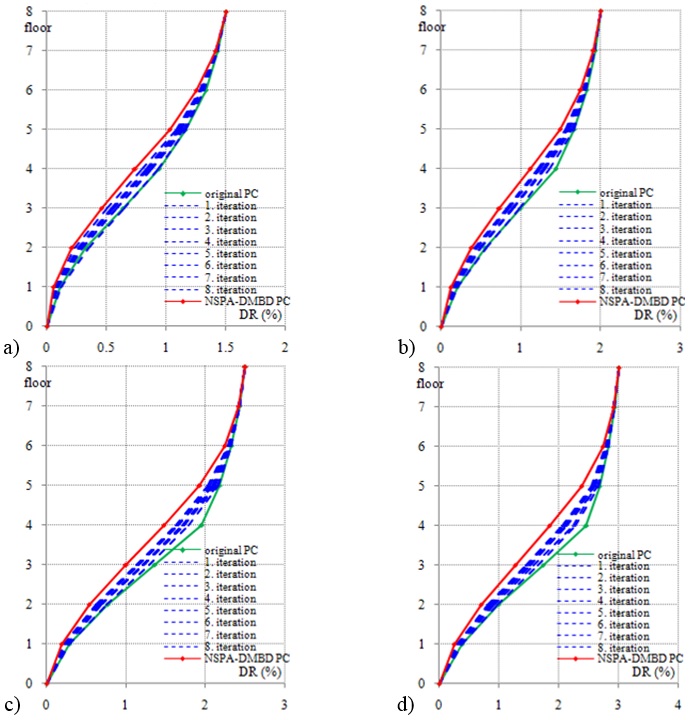
Slika 13. Dijagrami globalnih driftova DR prema NSPA-DMBD metodi za: a) DRmax=1.5%, b) DRmax=2%, c) DRmax=2.5%, d) DRmax=3%
Korekcijom mehanizma loma sistema koriguje se i odgovor kako na globalnom nivou, tako i na lokalnom, na nivou sprata i na nivou štapa. Implikacija ovog tvrđenja je da konstrukcija može sa povoljnijim stepenom oštećenja ili sa stepenom oštećenja koji je unapred kontrolisan prihvatiti veće seizmičke sile, odnosno da je nivo seizmičkog hazarda koji se može očekivati veći od nivoa seizmičkog hazarda za koji je ista projektovana. Primenom NSPA-DMBD metode kontroliše se stepen oštećenja objekta za uslove dejstva zemljotresa, tako da se na osnovu formiranih mehanizama loma sistema, a za određene nivoe drifta, mogu definisati stanja oštećenja.
Link za više informacija:
Cosic M., Brcic S.: The Development of Controlled Damage Mechanisms-Based Design Method for Nonlinear Static Pushover Analysis, Facta Universitatis, Series: Architecture and Civil Engineering, Vol. 12, No. 1, 2014, pp. 25-40.